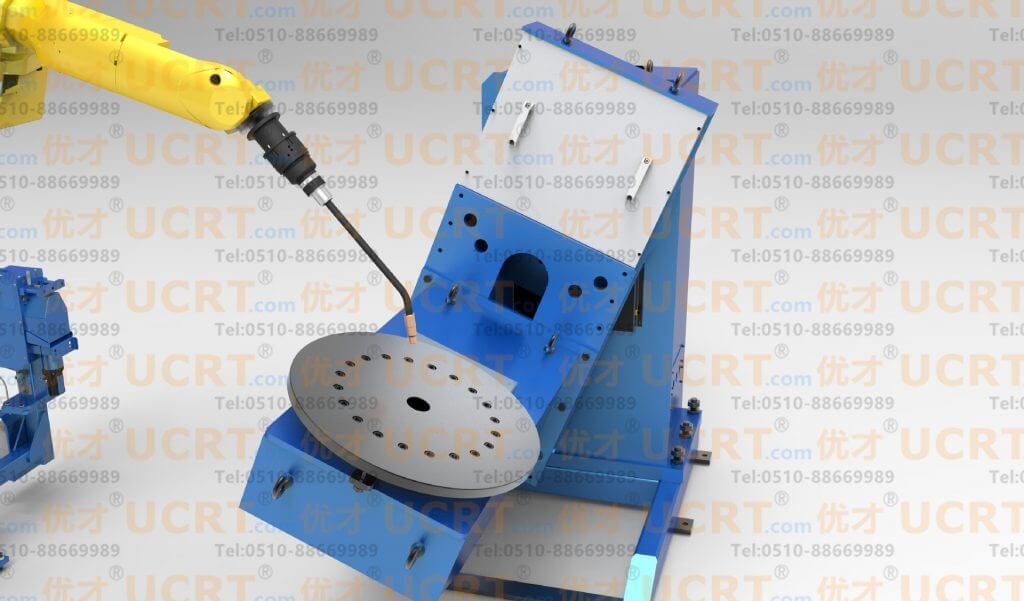
Posicionador robot de dos ejes en forma de L
- PRODUCT DETAIL
Posicionador robot de dos ejes en forma de L

Posicionador robot de dos ejes en forma de L Parámetro del producto
| nombre del producto | Voltaje de entrada nominal | Rango de voltaje de entrada | Método de accesorio compatible | El programa se adapta a la capacidad de almacenamiento de piezas de trabajo | Voltear y girar el ángulo de rotación | Mesa alta | Puede comunicarse con la marca del robot. |
| Posicionador de dos ejes tipo L | AC trifásico 200V 50 / 60HZ | AC trifásico 200V ± 10% | Neumática manual, neumática, neumática controlada electrónicamente | Capacidad de almacenamiento de 50 piezas diferentes | Cualquier ajuste de más o menos 360 grados | 600 mm | FANUC, ABB, KUKA, etc. |

| modelo | Carga de impulsión | La velocidad de giro más rápida | Duración de la carga | Dimensiones (mm) | Repetibilidad |
| UCRT -500 | 500KG | 10 rpm | 80% | Depende del diseño | ± 0,08 mm |
| UCRT -1000 | 1000 kg | 5 rpm | 80% | Depende del diseño | ± 0,08 mm |
| UCRT-2000 | 2000 kg | 4 rpm | 80% | Depende del diseño | ± 0,1 mm |

Posicionador robot de dos ejes en forma de L Principales áreas de aplicación:
Soldadura robotizada
Posicionador robot de dos ejes en forma de L Características:
◆ Adecuado para soldar soldaduras de varios lados;
◆ Reductor RV de precisión importado, servo de precisión combinado con tecnología de mecanizado y ensamblaje de precisión, garantiza efectivamente la precisión del posicionamiento repetido del desplazamiento y la vida útil;
◆ La buena integración de la comunicación de la tecnología eléctrica y los robots se puede utilizar junto con todos los robots de comunicación abierta.
◆ Compuesto por varios cabezales de potencia, que pueden realizar la soldadura de varios productos de tonelaje;
◆ Mecanismo de corrección del punto cero;
◆ El diseño mecánico es compatible con robots industriales con radio de operación: 1400/1600/1800/2000 mm, que es el más utilizado;
◆ Si hay cables y tubos de aire de abrazadera, todos los cables se enrutan de manera hueca para garantizar que el posicionador no dañe los cables durante el proceso de rotación.
NEXT: Barandilla de marco de soldadura de doble posicionador de robot de soldadura doble







